Les détails du produit
Convertisseur synchro/résolveur-numérique
(série HSDC/HRDC174)
1. Caractéristiques du produit (voir Fig. 1 pour la vue extérieure et Tableau 1 pour les modèles)
Conversion d'isolation différentielle interne
Résolution : 12 bits, 14 bits
Sortie de verrouillage à trois états
Vitesse de suivi continue élevée
Boîtier métallique à brouillard salin à 32 fils
MCM high- assemblage de densité
Capacité antistatique 2 000 V
Broche à broche compatible avec le produit SDC/RDCl740/1741/1742 de la société AD Taille : 44,2 × 28,9 × 7,2 mm3 ; poids : 22 g
Fig. 1 Vue extérieure de la série HSDC/HRDC174
2. Champ d'application
Système d'instruments de vol ;
Système de contrôle de l'artillerie ;
Système de contrôle avionique ;
Système de contrôle radar ;
Système de navigation maritime ;
Système de surveillance d'antenne ;
Système robotisé ;
Tour CNC;
Autres divers systèmes de contrôle automatique Tableau 1 modèles de produits
12 bits 14 bits
Synchro Resolver Synchro Resolver
HSDCl742-X11 HRDCl742-X13 HSDCl744-X11 HRDCl744-X13
HSDCl742
- X12 HRDCl742- X14 HSDCl744-X12 HRDCl744-X14 HSDCl742
-X41 HRDCl742-X18 HSDCl744 -X41 HRDCl744-X18
HSDCl742-X42 HRDCl742-X23 HSDCl744-X42 HRDCl744-X23
HSDCl742-X21 HRDCl742-X24 HSDCl744-X21 HRDCl744-X24
HSDCl742-X22 HRDCl742-X28 HSDCl744-X22 HRDCl744-
X28 HRDCl742-X43 HRDCl744-X43
HRDCl742-X44 HRDCl744-X44 DRHC l742-X48
HRDCl744 -X48
3. Aperçu
Les produits de la série HSDC/HDC174 sont des synchro/résolveur à suivi continu 12 bits ou 14 bits intégrés hybrides vers un convertisseur numérique conçus selon le principe d'asservissement de type II. Les produits de cette série adoptent le processus MCM, les éléments centraux adoptent des puces spéciales développées indépendamment par notre institut. Le produit adopte un boîtier métallique résistant au brouillard salin à cavité peu profonde DIL à 32 fils avec un petit volume et un poids léger, et compatible broche à broche avec les produits SDC/RDC1740/1741/1742 de la société AD, États-Unis.
La conception et la fabrication de HSDC/HRDCl74 répondent aux exigences de GJB 2438A-2002 « Spécifications générales pour les circuits intégrés hybrides » et aux spécifications de produit avec un niveau d'assurance qualité de H. 4. Performances techniques (Tableau 2, Tableau 3)
Tableau 2 Conditions nominales et conditions de fonctionnement recommandées
Max. valeur nominale absolue Tension d'alimentation Vs : ± 17,25 VCC
Tension d'alimentation logique VL : +7 V
Plage de température de stockage : -65 ℃ ~ + 150 ℃
Conditions de fonctionnement recommandées Tension d'alimentation Vs : ± 15 ± 0,75 V
Tension d'alimentation 5 V : 5 ± 0,25 V
Valeur efficace de la tension de référence VRef : 115 V, 26 V, 11,8 V
Valeur efficace de la tension du signal V1 : 90 V, 26 V, 11,8 V
Fréquence de référence f* : 400 Hz, 50 Hz, 2,6 kHz
Plage de température de fonctionnement TA : -55 ℃~125 ℃
Remarque : * indique qu'il peut être personnalisé selon les besoins de l'utilisateur.
Tableau 3 Caractéristiques électriques (-55~+125℃)
Caractéristiques Série HSDC/HRDC1740 Série HSDC/HRDC1744 Unité Remarques
Précision ±8,5 (max.) ±5,3 (max.) Minute angulaire Vitesse de suivi 36 (typique) 27 (typique) r/sec Résolution 12 14 bits Signal et fréquence de référence 50~2600 50~2600 Hz Signal tension d'entrée 2~90 2~90 V Tension d'entrée de référence 2~115 2~115 V Impédance d'entrée du signal 90 V Single-end 100 100 kΩ Différentiel de signal 200 200 kΩ 26 V Single-end
28 28 kΩ
Différentiel
de signal 56 56 kΩ
11,8 V
Impédance
de référence à extrémité
unique 13 kΩ 26 kΩ
Impédance d'entrée de référence 115V 127 127 kΩ Différentiel de référence 254 254 kΩ 26V Single-End 28 28 kΩ Différentiel de référence 56 56 kΩ 90V Single simple -fin 100 100 kΩ Différentiel de référence 200
200 kΩ
Constante d'accélération 80 000 (min.) 56 000 (min.) s2 Garantie de conception
Réponse échelonnée 75 (max.) 100 (max.) ms Courant d'alimentation +VS +15V 35 (max.) 35 (max.) mA -VS + 15 V 35 (max.) 35 (max.) mA VL +5 V 56 (max.) 56 (max.) mA Consommation électrique 1,4 (max.) 1,4 (max.) W Temps de stabilisation ou de relâchement 80 (max.) 80 ( max.) ns Temps de stabilisation 640 (max.) 640 (max.) ns
Largeur d'impulsion occupée 200~600 (typique 400) 200~600 (typique 400) ns Capacité de charge 2 (min.) 2 (min.) TTL Sortie numérique VOH 3,3 (min.) 3,3 (min.) VDC VOL 0,7 (max. ) 0,7 (max.) VDC Capacité de charge 3 (max.) 3 (max.) TTL Sélection de la plage de température de fonctionnement 8YZ -55~+125 -55~+125 ℃ 5. Principe de fonctionnement (Fig. 2 et Fig. 3)
Le signal d'entrée de la synchro (ou du résolveur) est converti en signal orthogonal via l'isolation différentielle interne :
Vsin=KE0sin(ωt+α) sinθ (sin)
Vcos=KE0sin(ωt+α) cosθ (cos)
Où θ est l'angle d'entrée analogique.
Ces deux signaux et l'angle numérique φ du compteur interne réversible sont multipliés dans le multiplicateur des fonctions sinus et cosinus et le signal d'erreur est obtenu après traitement :
KE0sin(ωt+α) (sinθ cosφ -cosθ sinφ)
soit KE0sin(ωt+α) sin(θ-φ)
Ce signal est envoyé à un oscillateur contrôlé en tension après amplification, discrimination de phase et filtration d'intégration. Si θ-φ≠0, l'oscillateur contrôlé en tension produira des impulsions et le compteur réversible les compte jusqu'à ce que θ-φ=0. Dans ce processus, le convertisseur suit en permanence le changement d’angle d’entrée. Fig.2 Schéma fonctionnel du principe de fonctionnement
Fig. 3 Le diagramme de séquence temporelle pour
l'entrée logique de transfert de bus inhibe uniquement le transfert de données du compteur réversible au verrou de sortie sans interrompre le fonctionnement de la boucle de suivi. Lorsque le système d'inhibition est relâché, une impulsion sera générée automatiquement, qui est utilisée pour mettre à jour les données de sortie.
L'entrée détermine l'état des données de sortie. Alors que Logic Hi fait apparaître l'extrémité de sortie dans un état de haute impédance ; Logic Low transfère les données du verrou vers les broches de sortie. démarre les données de 8 bits de niveau élevé pour qu'elles soient valides, alors que démarre les données de 6 bits de niveau faible pour qu'elles soient valides (HSDC/HRDC1742 est de type 4 bits de niveau faible).
Occupé
Lorsque l'entrée du convertisseur change, Busy émet un train d'impulsions de niveau CMOS, sa fréquence est déterminée par la vitesse de rotation la plus élevée. Le front descendant des impulsions d'occupation déclenche le verrou pour mettre à jour les données et les données de sortie sont valides après max. Délai de 600ns. La largeur typique des impulsions occupées est de 400 ns. La capacité de charge de la sortie est de 3TTL.
(1) Méthodes et séquence temporelle de transfert de données
Deux méthodes suivantes sont disponibles pour le transfert de données :
① mode
Après 640 ns de logique basse, les données de sortie sont valides et le convertisseur réalise le transfert de données via et . Une fois l'inhibition relâchée, le système générera automatiquement une impulsion dont la largeur est égale à celle de l'impulsion d'occupation pour la mise à jour des données.
② Mode buste :
Au front montant de l'impulsion d'occupation, le compteur réversible à trois états compte ; sur le front descendant de l'impulsion d'occupation, il génère en interne une impulsion de verrouillage dont la largeur est égale à celle de l'impulsion d'occupation pour mettre à jour les données du verrou à trois états, la séquence temporelle du transfert de données est représentée sur la figure 3, en d'autres termes , après 600 ns de logique d'occupation faible, le transfert stable des données est valide. En mode de lecture asynchrone, la sortie Busy est un train d'impulsions de niveau CMOS, les largeurs de ses niveaux haut et bas dépendent de la fréquence de fonctionnement et de la vitesse de rotation de l'appareil sélectionné.
(2) Compatibilité
Lorsque les produits de la série HSDC/HRDC174 sont utilisés dans des conditions de signaux non nominaux et de tension de référence non nominale, des résistances proportionnelles sont connectées en série à l'extrémité du signal et à leur extrémité d'entrée d'excitation afin d'assurer la compatibilité.
Exemple 1 : La connexion du HSDC1742-441 pour une tension d'excitation/tension du signal/fréquence de 36 V/26 V/400 Hz est illustrée à la Fig. 4 : Exemple 2 :
Connexion du HRDC1742-418 pour une tension d'excitation/tension du signal/fréquence de 36 V/26 V/ 400 Hz est illustré à la Fig. 5 :
Fig. 4 Connexion du HSDC1742-411 Fig. 5 Connexion du HSDC1742-418 R1=(V1 - V1 valeur nominale)×1,11 k
=(26 V- 11,8 V)×1,11 k
=15,8 kΩ
R2=(VRef - Valeur nominale VRef)×1,11 k
=(36 - 26)×1,11 k
=11,1 kΩ
R3=(V1 - V1 valeur nominale)×1,11 k
=(26 V- 11,8 V)×1,11 k
=15,8 kΩ
R4=(VRef - VRef valeur nominale)×1,11 k
=(36 - 26)×1,11 k
=11,1 kΩ
(3) Comportement dynamique
La fonction de transfert du convertisseur est donnée par la Fig. 6 :
Gain en boucle fermée :
Gain en boucle fermée :
θin + θout
Fig. 6 Fonction de transfert
Modèle : HSDC /HRDC1742
Ici, Ka=80000, T1=0,0087, T2=0,001569
(4) Erreur d'accélération
Le convertisseur est conçu en utilisant le principe de suivi de la boucle d'asservissement de type II, donc théoriquement, il n'a pas d'erreur de décalage de vitesse, mais a une erreur d'accélération. Cette erreur peut être définie comme suit en utilisant la constante d'accélération K du convertisseur :
Ka=
Ci-dessous l'exemple de calcul de l'erreur de poursuite du convertisseur 14 bits HSDC1744 en utilisant la constante d'accélération Ka :
Ka=56000, l'accélération est de 50 tours/s2
Erreur du bit le moins significatif = = 14,62 LSB
6. Courbes caractéristiques typiques (Fig. 7 et Fig. 8)
Fréquence/Hz
Fig. 7 Diagramme de gain du HSDC/HRDC1742 Fréquence/Hz
Fig. 8 Diagramme de gain du HSDC/HRDC1742
7. MTBF courbe (Fig. 9)
Température/℃
Fig. 9 Courbe MTBF-température 8. Désignation des broches (Fig. 10, Tableau 4)
Fig. 10 Broches (vue de dessous)
(Remarque : selon GJB/Z299B-98, bon état de terre prévu)
Tableau 4 Désignation des broches
Broche Symbole Fonction Broche Symbole Fonction
1 D1 Sortie numérique 1 (MSB) 17② NC/S4 Aucune connexion/entrée résolveur S4
2 D2 Sortie numérique 2 18 S3 Entrée résolveur/synchro S3
3 D3 Sortie numérique 3 19 S2 Entrée résolveur/synchro S2
4 D4 Sortie numérique 4 20 S1 Entrée résolveur/synchro S1
5 D5 Sortie numérique 5 21 NC Aucune connexion
6 D6 Sortie numérique 6 22 NC Aucune connexion
7 D7 Sortie numérique 7 23 Cas Cas
8 D8 Sortie numérique 8 24④ NC或(Vel)* Non connexion (ou sortie vitesse)
9 D9 Sortie numérique 9 25③ Activer bas 4 bits/6 bits
10 D10 Sortie numérique 10 26 Activer haut 8 bits
11 D11 Sortie numérique 11 27 Busy Signal « occupé »
12 D12 Sortie numérique 12 28 Inhibit
13 NC/D13 Aucune connexion/sortie numérique 13 29 +VS Alimentation +15 V
14 NC/D14 Aucune connexion/sortie numérique 14 30 GND Masse
15 RLo Low entrée du signal de fin de référence 31 -VS -alimentation 15V
16 RHi Entrée du signal de fin de référence haute 32 VLo alimentation +5V
Remarques : ① Pour les convertisseurs des séries HSDC1742 et HRDC1742, les broches 13 et 14 ne sont pas connectées ;
② Pour le HSDC174X, la broche 17 n'est pas connectée ; pour HRDC174X, la broche 17 est l'extrémité d'entrée du résolveur S4 ;
③ Pour les convertisseurs des séries HSDC1742 et HRDC1742, la broche 25 est destinée à activer le contrôle faible 4 bits ;
④ Lorsqu'il y a une exigence de vitesse, elle est sortie de la broche 24.
9. Tableau des valeurs de poids (Tableau 5)
Tableau 5 Tableau des valeurs de poids
Angle de bit Angle de bit Angle de
bit 1 180,0000 6 5,6250 11 0,1758
2 90,0000 7 2,8125 12 (pour LSB 12 bits) 0,0879
3 45,0000 8 1,4063 13 0,0439
4 22,5000 9 0,7031 14 (pour LSB 14 bits) 0,0220
5 11,2500 10 0,3516 10. Schéma de connexion pour une application typique (Fig. 11)
Remarques :
(1) La tension aux bornes des broches 29 et 31 doit être ±15 V et ne doit pas être connecté de manière inversée. L'alimentation logique numérique +5 V est connectée à la broche 32.
(2) Entre l'alimentation et la masse, un condensateur céramique de 0,1 µF et un condensateur électrolytique de 6,8 µF doivent être connectés en parallèle.
(3) La broche marquée Case a été connectée au boîtier.
(4) Les sorties numériques du HSDC/HRDC1742 sont les broches 1 à 12, les broches 13 et 14 ne sont pas connectées. Fig. 11 Schéma de connexion pour une application typique
(5) La référence est connectée à RLo sur la broche 15 et RHi sur la broche 16. Dans le cas d'une synchronisation, les signaux sont connectés à S1, S2 et S3 selon les conventions suivantes : sin(
ωt +α) sinθ
sin(ωt+α) sin(θ+120o)
sin(ωt+α) sin(θ+240o)
Dans le cas du résolveur, les signaux sont connectés à S1, S2, S3 et S4 selon les conventions suivantes :
sin(ωt+α) sinθ
sin(ωt+α) cosθ
(6) Pour le résolveur, la broche 17 est S4, et pour la synchro, la broche 17 n'est pas connectée.
11. Spécifications de l'emballage (unité : mm) (Fig. 12, Tableaux 6 et 7)
Fig.8 Vue extérieure de l'emballage Tableau 6 Symboles et valeurs nominales
Symbole Valeur nominale
A 7,2
Φb 0,45
D 44,2
E 28,9
e 2,54
e1 22,86
L 5min
Tableau 7 Matériaux du boîtier
Modèle du boîtier Embase Placage du collecteur Couvercle Placage du couvercle Matériau de la broche Placage de la broche Style d'étanchéité Remarques
UP4429- 32a Kovar (4J29) Alliage Ni Fe-Ni (4J42)
Ni Kovar (4J29) Ni/Au Emballage assorti Le revêtement de la broche 23 est Ni
Remarque : la température des broches à souder ne doit pas dépasser 300 ℃ en 10 s.
12. Légende de numérotation des pièces (Fig. 13)
Fig. 13 Légende de numérotation des pièces
Remarque : lorsque la tension de signal et la tension de référence (Z) ci-dessus ne sont pas standard, elles doivent être indiquées comme suit :
(par exemple, tension de référence 5 V et tension de signal 3 V sont exprimés en -5/3)
Précautions d'emploi
La tension d'alimentation doit être maintenue à la tension de polarité correcte.
Lorsque le maximum. Si la valeur nominale absolue est dépassée, l'appareil risque d'être endommagé.
Pendant l'assemblage, le bas du produit doit s'adapter étroitement au circuit imprimé afin d'éviter d'endommager les broches, et une protection antichoc doit être ajoutée, si nécessaire.
Ne pliez pas les broches, sinon cela provoquerait une rupture de l'isolant, ce qui affecterait les propriétés d'étanchéité.
Lorsque l'utilisateur passe une commande pour le produit, les indices de performances électriques détaillés doivent faire référence à la norme d'entreprise concernée.
Convertisseur synchro/résolveur-numérique
(série HSDC/HRDC1746)
1. Caractéristiques (voir Fig. 1 pour la vue extérieure et Tableau 1 pour les modèles)
Conversion d'isolation différentielle interne
Résolution : 16 bits
Sortie de verrouillage à trois états
Suivi ininterrompu pendant le transfert de données
Boîtier métallique à 32 fils Taille : 45,39 × 29,0 × 7,2 mm2 ; Poids : 28 g
Fig. 1 Vue extérieure de la série HSDC/HRDC1746 Tableau 1 Modèles de produits
HRDC1746 418
HRDC1746 414
2. Champ d'application
Système d'instruments de vol ; système de servocommande militaire ; système de contrôle des canons; système électronique aéronautique; système de contrôle radar; système de navigation pour navires de guerre ; surveillance des antennes ; technologie robotique, machines-outils à commande numérique informatisée (CNC); et tout autre système de contrôle d'automatisation.
3. Aperçu
Synchroniseur/résolveur série HSDC/HRDC1746 - le convertisseur numérique est conçu sur le principe du principe de suivi servo de type II et adopte une entrée d'isolation différentielle, la sortie de données adopte un mode de verrouillage à trois états, il convient à la conversion de signal analogique/signal numérique de trois -synchronisation à fils et résolveur à quatre fils. Avec une vitesse de conversion rapide et des performances stables et fiables, cet appareil peut être largement utilisé dans la mesure d'angle et le système de contrôle automatique.
Ce produit est fabriqué selon le processus d'intégration hybride à couche épaisse et est un boîtier métallique DIP totalement scellé à 32 fils. La conception et la fabrication des produits doivent répondre aux exigences du GJB2438A-2002 « Spécifications générales du circuit intégré hybride » et aux spécifications détaillées des produits.
4. Performances techniques (Tableau 2, Tableau 3)
Tableau 2 Conditions nominales et conditions de fonctionnement recommandées
Max. valeur nominale absolue Tension d'alimentation Vs : ±17,25
VOC Tension logique VL : +7 V
Plage de température de stockage : -55~+150 ℃
Conditions de fonctionnement recommandées Tension d'alimentation Vs : ±15 ±5 %
Valeur efficace de la tension de référence VRef : ±10 % de la valeur nominale valeur
Valeur efficace de la tension du signal Vi : ±5 % de la valeur nominale
Fréquence du signal de référence f* : ±10 % de la valeur nominale
Déphasage entre le signal et l'excitation : <±10 %
Plage de température de fonctionnement TA : 40~+105℃
Tableau 3 Caractéristiques électriques
Caractéristiques Série HSDC/HRDC1746 Remarques
Min. Max.
Précision/minute angulaire 2,6 2,6
Vitesse de suivi : rps 3 3
Résolution/bit 16 Fréquence du signal et de référence/Hz 50 2,6k
Tension du signal (valeur efficace)/V 2 90
Tension de référence (valeur efficace)/V 2 115
Remarque : * l'indique peut être personnalisé selon les besoins de l'utilisateur.
5. Principe de fonctionnement
Le signal d'entrée de synchronisation (ou signal d'entrée du résolveur) est converti en signal orthogonal via une isolation différentielle interne :
V1-KE0sinθ sinωt
V2-KE0cosθ sinωt
Où θ est l'angle d'entrée simulé.
Le signal orthogonal est multiplié par l'angle numérique binaire φ dans le compteur réversible interne du multiplicateur de fonction sinus-cosinus et une fonction d'erreur est obtenue :
KE0sinθ cosφ sinωt-KE0cosθ sinφ sinωt=KE0sin(θ-φ) sinωt
Grâce à l'amplification d'erreur, à la discrimination de phase et à la filtration de cette fonction d'erreur, sin (θ-φ) est obtenu, lorsque θ-φ = 0 (dans les limites de la précision du convertisseur), cette erreur fera changer l'impulsion de correction de sortie de l'oscillateur contrôlé en tension. l'angle numérique binaire φ du compteur réversible de manière à rendre la valeur φ de sortie égale à l'entrée θ dans les limites de la précision du convertisseur, le système devient stable et peut suivre le changement de l'angle d'entrée φ. De cette manière, un angle numérique binaire φ représentant l'angle de l'arbre d'entrée θ est obtenu sur le compteur réversible (Fig. 2).
Fig. 2 Schéma fonctionnel du circuit
(1) Caractéristiques dynamiques
La fonction de transfert du convertisseur est illustrée à la Fig. 3 :
Gain en boucle ouverte :
Fonction en boucle fermée :
Pour le module de ce modèle Ka=48000/S2, T1=7,1 ms, T2=1,25 ms Fig. 3 Transfert de fonctions du convertisseur
(2) Méthodes de transfert de données et séquence temporelle
Contrôle de sélection de puce
Cette broche est la broche d'entrée du contrôle Logique, sa fonction est de transmettre des données au convertisseur pour réaliser un contrôle à trois états. Le niveau bas est valide, les données de sortie du convertisseur occupent le bus de données. Lorsqu'elle est au niveau haut, la broche de sortie de données du convertisseur est dans trois états, l'appareil n'occupe pas le bus.
Sélection d'octet
Cette broche est la broche d'entrée logique de contrôle, sa fonction est d'exécuter en externe un contrôle de sélection sur les données de sortie du convertisseur en mode de transfert de bus de données 8 bits ou de bus de données 16 bits. Lorsque le mode de transfert de bus de données 16 bits est requis, gardez cette broche logique haute, les données seront transférées dans le bus, la sortie d'octet de poids fort se trouve dans la broche D1 à D8 (D1 est le bit de poids fort) et l'octet de poids faible est dans D9 à D16. . Lorsque le mode de transfert de bus de données 8 bits est nécessaire, les données sont obtenues aux broches D1 à D8 (disposées de haut en bas), et les 8 bits élevés et les 8 bits faibles sont obtenus via deux séquences temporelles, en d'autres termes, lorsque l'octet est sélectionné. est logique haut, 8 bits élevés sont sortis et quand il est logique bas, 8 bits bas sont sortis.
Contrôle de verrouillage des données (signal d'inhibition)
Cette broche est la broche d'entrée de la logique de contrôle, sa fonction est de transmettre des données en externe au convertisseur pour réaliser un contrôle de verrouillage ou de dérivation en option. Au niveau haut, les données de sortie du convertisseur sont directement sorties sans verrouillage, voir le diagramme de séquence temporelle du transfert de données. À bas niveau, les données de sortie du convertisseur sont verrouillées, la boucle interne n'est pas interrompue et le suivi continue de fonctionner tout le temps, mais le compteur ne génère pas de données. Lorsqu'il est nécessaire de transférer des données, le convertisseur contrôle d'abord le signal pour verrouiller les données de haut en bas, maintient la logique basse pendant 640 ns, puis règle l'entrée sur bas (à ce moment, l'appareil occupe le bus de données), puis obtient données via la sélection d'octets, puis mettez toutes les logiques de contrôle au niveau haut pour actualiser et verrouiller les données afin de se préparer au transfert des données suivantes,
(3) Méthode d'atténuation du signal d'entrée (Fig.4 et Fig.5)
Fig4 Séquence temporelle du transfert de bus 16 bits Fig5 Séquence temporelle du transfert de bus 8 bits
6. Courbe MTBF (Fig. 6)
Fig.6 Température MTBF courbe 7. Désignation des broches (Fig. 7, Tableau 4)
Fig. 7 Broches (Vue de dessous)
(Remarque : selon GJB/Z299B-98, bon état de terre prévu)
Tableau 4 Désignation des broches
Broche Symbole Signification Broche Symbole Signification
1 NC Non connexion 17 NC Laisser non connecté
2 D9 Sortie pour bit numérique 9 18 RHi
Entrée RHi du résolveur
3 D10 Sortie pour bit numérique 10 19 RLo Entrée RLo du résolveur rotatif
4 D11 Sortie pour bit numérique 11 20 GND Masse
5 D12 Sortie pour bit numérique 12 21 -VS -15V alimentation
6 D13 Sortie pour bit numérique 13 22 + VS Alimentation +15 V
7 D14 Sortie pour bit numérique 14 23 Commande de verrouillage numérique
8 D15 Sortie pour bit numérique 15 24 D1 Sortie pour bit numérique 1
9 D16 Sortie pour bit numérique 16 25 D2 Sortie pour bit numérique 2
10 Sélection de puce Activer le contrôle 26 D3 Sortie pour bit numérique 3
11 Bysel Sélection d'octet 27 D4 Sortie pour bit numérique 4
12 S4/NC① Entrée S4/pas de connexion 28 D5 Sortie pour numérique bit 5
13① S3 S3 Entrée 29 D6 Sortie pour bit numérique 6
14① S2 S2 Entrée 30 D7 Sortie pour bit numérique 7
15 S1 S1 Entrée 31 D8 Sortie pour bit numérique 8
16 NC Aucune connexion 32 NC Aucune connexion
Remarque : ① Pour l'appareil HSDC, S4 n'est pas utilisé.
8. Tableau des valeurs de poids (Tableau 5)
Tableau 5 Tableau des valeurs de poids
Bit (MSB) Angle Bit (MSB) Angle Bit (MSB) Angle Bit (MSB) Angle
1 180,0000 5 11,2500 9 0,7031 13 0,0439
2 90,0000 6 5,6250 10 0,3516 14 0,0220
3 45,0000 7 2,8125 11 0,1758 15 0,0110
4 22,5000 8 1,4063 12 0,0879 16 0,0055
Connexion du convertisseur
±15V, +5V et GND doivent être connectés aux broches correspondantes du convertisseur, notez que les polarités de l'alimentation doivent être correctes, sinon le convertisseur peut être endommagé. Il est recommandé de connecter une capacité de dérivation de 0,1 μF et 6,8 μF en parallèle entre chaque borne d'alimentation et la terre.
La source de signal et d'excitation peut être connectée aux extrémités S1, S2, S3 et S4 et RHi et RLo avec une erreur de 5 %.
L'entrée du signal doit correspondre à la phase de la source d'excitation afin qu'elle puisse être correctement connectée au convertisseur, leurs phases sont les suivantes :
RHi~RLo:VRsinωt
Pour la synchro, les entrées de signal sont :
Pour S1~S3 : sinθ sinωt
Pour S3 ~S2 : sin(θ+120o) sinωt
Pour S2~S1 : sin(θ+240o) sinωt
Pour le résolveur, les entrées de signal sont :
Pour S1~S3 : sinθ sinωt
Pour S2~S4 : cosθ sinωt
Remarque : aucun signal d'entrée de RHi, RLo, S1, S2, S3 et S4 peuvent être connectés à d'autres broches par crainte d'endommager l'appareil.
10. Spécifications de l'emballage (unité : mm) (Fig. 8, Tableau 6)
Fig.8 Vue extérieure de l'emballage
Tableau 6 Matériaux du boîtier
Modèle de boîtier Embase Placage d'embase Couvercle Placage de couvercle Matériau des broches Placage des broches Style d'étanchéité Remarques
UP4429- 32a Kovar (4J29) Alliage Ni Fe-Ni (4J42) Ni Kovar (4J29) Ni/Au Emballage assorti Remarque : la température des broches à souder ne doit pas dépasser 300 ℃ en 10 secondes.
11. Légende de numérotation des pièces (Fig. 9)
Fig. 9 Légende de numérotation des pièces
Remarque : lorsque la tension du signal et la tension de référence (Z) ci-dessus ne sont pas standard, elles doivent être indiquées comme suit :
(par exemple, tension de référence 5 V et tension du signal 3 V sera exprimé par -5/3)
Précautions d'emploi
Alimentez correctement, pendant la mise sous tension, connectez avec précision les pôles positifs et négatifs de l'alimentation pour éviter l'épuisement professionnel.
Pendant l'assemblage, le bas du produit doit s'adapter étroitement au circuit imprimé afin d'éviter d'endommager les broches, et une protection antichoc doit être ajoutée, si nécessaire.
Ne pliez pas les broches pour éviter que l'isolant ne se brise, ce qui affecterait la propriété d'étanchéité.
Lorsque l'utilisateur passe une commande pour le produit, les indices de performances électriques détaillés doivent faire référence à la norme d'entreprise concernée.
Synchro/Résolveur vers Convertisseur Numérique
(Série HSDC/HRDC211)
1. Caractéristiques (voir Fig. 1 pour la vue extérieure et Tableau 1 pour les modèles)
Fréquence d'excitation : 50 Hz, 400 Hz, 2,6 kHz
Résolution: 10 bits, 12 bits, 14 bits
Taux de suivi élevé
L'entrée non standard est réglable via une résistance externe ou ajustée à l'extrémité d'entrée du produit Sortie de
tension cc directement proportionnelle à la vitesse angulaire
Compatible avec la série SDC1700 de la société américaine AD Taille: 79,4 × 66,7 × 11,8 mm2
Poids : 108 g
Fig. 1 Vue extérieure de la série HSDC/HRDC211 Tableau 1 Modèles de produits
Résolveur synchrone 12 bits 14 bits
Résolveur synchrone
HSDC2112-412 HRDC2112-418 HSDC2114-412 HRDC2114-418
HSDC2112-411 HRDC211 2- 414 HSDC2114-422
HRDC2114-414
HRDC 2112N HSDC2114-411 HRDC 2114N
2. Champ d'application
Système servo ; système d'antenne; mesure d'angles; technologie de simulation; contrôle de l'artillerie; contrôle des machines-outils industrielles
3. Aperçu
Cette série est un synchro/résolveur numérique vers convertisseur de structure modulaire avec convertisseur d'isolation SCOTT à semi-conducteurs intégré, conçu selon le principe du servo de type II, et peut réaliser un suivi et une conversion continus.
La puissance de fonctionnement est de ± 15 V et + 5 V CC. Il existe deux types de signal de sortie : signal de synchronisation et de référence à trois lignes (convertisseur SDC) ou résolveur à quatre lignes et signal de référence (convertisseur RDC) ; la sortie adopte des codes numériques parallèles du système binaire.
4. Performances électriques (Tableau 2, Tableau 3)
Tableau 2 Conditions nominales et conditions de fonctionnement recommandées
Max. valeur nominale absolue Tension d'alimentation Vs : ± 17,5 V
Tension d'alimentation logique : +7 V
Plage de température de stockage : -65 ℃~+150 ℃
Conditions de fonctionnement recommandées Tension d'alimentation + Vs : ± 15 V
Tension d'alimentation logique 5 V VL : ± 5 V
Valeur efficace de la tension de référence VRef : 11,8 V, 26 V, 115 V
Valeur efficace de la tension du signal Vi : 11,8 V, 26 V, 90 V
Fréquence de référence f* : 50 Hz, 400 Hz, 2,6 kHz
Plage de température de fonctionnement TA : 0 ~ 70 ℃, -40 ~ + 85 ℃
Remarque : * indique qu'il peut être personnalisé selon les besoins de l'utilisateur.
5. Principe de fonctionnement
Le signal d'entrée de synchronisation (ou le signal d'entrée du résolveur) est converti en signal orthogonal via une isolation différentielle interne :
V1-KE0sinθ sinωt,V2-KE0cosθ sinωt
Tableau 3 Caractéristiques électriques
Caractéristiques HRDC/HSDC2110 HRDS/HSDC2112 HRDC/HSDC2114 Unité Remarques
±10 % fluctuation du signal et de la tension de référence
Précision ±10 % fluctuation de la fréquence de fonctionnement ±22 ±8,5 ±5,3 Minute angulaire ±5 % fluctuation de l'alimentation 5(50 Hz) 5(50 Hz) 1,38(50 Hz) Vitesse de suivi 36(400 Hz) 36(400 Hz) ) 12 (400 Hz) r/s
75 (2,6 kHz) 75 (2,6 kHz) 25 (2,6 kHz)
Résolution Code numérique parallèle binaire 10 12 14 bits Signal et fréquence de référence 50, 400, 2,6 kHz En option
Valeur efficace de la tension d'entrée de référence 11,8, 26, 90 V En option
Efficace valeur de la tension d'entrée de référence 11,8, 26, 115 V En option
Impédance d'entrée du signal Signal 90 V Single-end 100 kΩ Différentiel 200 kΩ Signal 26 V Single-end 28 kΩ Différentiel 56 kΩ
Signal 11,8 V Single-end 13 kΩ
Différentiel 26 kΩ
Impédance d'entrée de référence 115 V de référence Single-end 127 kΩ Différentiel 254 kΩ Référence 26 V Single-end 28 kΩ Différentiel 56 kΩ Référence 11,8 V Single-end 13 kΩ Différentiel 26 kΩ Réponse échelonnée 50 Hz 1 500 max ms 400 Hz 125 max 2,6 kHz 75 max Tension d'alimentation +VS +15 V 18 mA
-VS
+15V 18
VL +5V 2
Occupé Largeur d'impulsion 200~600 ns Signal Capacité de chargement 3max TTL Sortie numérique VOH 2,4min V VOL 0,4max V Capacité de chargement 3max TTL Où θ est l'angle d'entrée simulé.
Le signal orthogonal est multiplié par l'angle numérique binaire φ dans le compteur réversible interne du multiplicateur de fonction sinus-cosinus et une fonction d'erreur est obtenue :
KE0sinθ cosφ sinωt-KE0cosθ sinφ sinωt=KE0sin(θ-φ) sinωt
Les signaux sont envoyés à l'oscillateur contrôlé en tension après amplification, discrimination de phase et filtration d'intégration. Si θ-φ≠0, l'oscillateur contrôlé en tension produira une impulsion pour modifier les données dans le compteur réversible, jusqu'à ce que θ-φ devienne zéro avec la précision de le convertisseur, pendant ce processus, le convertisseur suit le changement de l'angle d'entrée θ tout le temps. Pour le principe de fonctionnement, voir Fig. 2.
Fonction de transfert : voici les paramètres de la fonction de transfert du HSDC2112 et du HSDC2114 (400 Hz). Pour les autres modèles, veuillez contacter directement le fabricant. Fig.2 Schéma fonctionnel du principe de fonctionnement du convertisseur
HSDC2112 (400 Hz)
θout(S)/θin(S)=
HSDC2114 (400 Hz)
θout(S)/θin(S)=
(1) Transfert de données
Il existe deux méthodes pour lire les données valides du convertisseur comme suit :
mode (lecture synchrone) :
réglé sur « 0 » logique, à ce moment, le convertisseur arrêtera le suivi. Attendez 1 µs, les données de sortie se stabilisent. Lisez les données, à ce moment, les données lues sont les données valides à ce stade (retardées de 1 µs). Réglé sur le « 1 » logique, à ce moment, le convertisseur recommencera le suivi afin de se préparer à la lecture des prochaines données valides.
Mode occupé (lecture asynchrone) :
En cas de mode de lecture asynchrone, à « 1 » logique ou vacant, la boucle interne du convertisseur est toujours en état de suivi. Si la boucle interne est dans un état stable ou si les données de sortie sont valides, cela doit être déterminé par l'état du signal occupé, lorsque le signal occupé est à un niveau élevé, cela signifie que les données sont en cours de conversion et que les données à ce moment sont données invalides instables ; Lorsque le signal occupé est à un niveau bas, les données à ce moment sont des données stables et valides et peuvent être lues. En mode de lecture asynchrone, la sortie Occupé est un train d'impulsions de niveau TTL, la largeur entre les deux est liée à la vitesse de rotation, reportez-vous au diagramme de séquence temporelle 3 pour le transfert de données. Fig.3 Diagramme chronologique du transfert de données
(2) Mode d'atténuation du signal d'entrée
Si la synchro ou le résolveur utilisé par l'utilisateur n'est pas standard, afin que la tension du signal d'entrée et la tension d'excitation d'entrée correspondent aux valeurs nominales du convertisseur, l'utilisateur peut adopter la méthode de résistance d'atténuation externe connectée en série, c'est-à-dire pour chaque 1 V dépassant la valeur nominale, connectez une résistance de 1,1 kΩ en série à l'extrémité d'entrée correspondante. Lors de l'utilisation du convertisseur, la résistance série à chaque borne doit être sélectionnée et fournie avec précision, et un matériau de résistance du même lot doit être adopté de manière à garantir la précision de conversion du convertisseur dans la large plage de température, pour chaque 0,1 % de correspondance. L'erreur de la résistance série générera une erreur de conversion de 1,7 minute angulaire.
Il est recommandé par le fabricant qu'il soit préférable de notifier au fabricant de personnaliser le synchro ou le résolveur non standard selon les paramètres requis lorsque l'utilisateur les utilise.
6. Courbe MTBF (Fig. 4)
Fig. 4 Courbe MTBF-température
(Remarque : selon GJB/Z299B-98, bon état du sol prévu) 7. Désignation des broches (Fig. 5, Tableau 4)
Remarque : ① la structure ci-dessus convient pour HRDC2114
② Pour SDC, pas de broche S4.
③ Pour les appareils 12 bits, pas de broches 13 et 14, pour les appareils 10 bits, pas de broches 11, 12, 13 et 14.
Fig. 5 Broches (vue de dessus)
Tableau 4 Désignation des broches
Symbole de
broche Fonction Symbole de broche Fonction
1 D1 Sortie numérique bit 1 (MSB) 15 Vel Sortie de tension de vitesse angulaire
2 D2 Sortie numérique bit 2 16 S4 Entrée de signal
3 D3 Sortie numérique bit 3 17 S3 Entrée de signal
4 D4 Sortie numérique bit 4 18 S2 Entrée de signal
5 D5 Sortie numérique bit 5 19 S1 Entrée de signal
6 D6 Sortie numérique bit 6 20 Busy Sortie de signal d'occupation
7 D7 Bit de sortie numérique 7 21 Entrée de signal d'inhibition
8 D8 Bit de sortie numérique 8 22 +15 V Alimentation
+15 V
9 D9 Bit de sortie numérique 9 23 GND GND
10 D10 Bit de sortie numérique 10 (LSB 10 bits) 24 -15 V - Alimentation 15 V
11 D11 Numérique bit de sortie 11 25 Alimentation +5 V +5 V
12 D12 Bit de sortie numérique 12 (LSB 10 bits) 26 RLo Extrémité basse de l'entrée du signal de référence
13 D13 Bit de sortie numérique 13 27 RHi Extrémité basse de l'entrée du signal de référence
14 D14 Sortie numérique bit 14 (LSB 10 bits) Remarques : ① Alimentation : +15 V, +5 V, GND.
② Sortie numérique binaire : 10 bits, 12 bits et 14 bits, respectivement.
③ RHi, RLo : entrée du signal d'excitation.
④ S1, S2, S3 et S4 : entrée signal de synchro ou résolveur. (S4 non utilisé pour la synchro)
⑤ Vel : signal de vitesse. Il s'agit d'un signal de tension dont la valeur est proportionnelle à la vitesse angulaire de rotation de l'arbre.
⑥ Occupé : signal d'occupation. Il indique si les données du convertisseur sont en cours de mise à jour. Lorsque Busy est au niveau haut, cela indique que le convertisseur effectue une conversion de données, la sortie de données à ce moment n'est pas valide ; lorsque Busy est à un niveau bas, les données dans le convertisseur sont stables et la sortie de données à ce moment est valide.
⑦ : Il s'agit d'un signal d'inhibition externe. Par ce signal, l'état de suivi interne peut être contrôlé, lorsqu'il est logique « 1 », le convertisseur est dans un état de suivi normal à l'intérieur, à ce moment, le signal occupé indique si les données de sortie sont valides ou non, quand est logique « 0 ». », le convertisseur arrête temporairement de suivre l'état, les données de sortie restent stables et constituent les données de sortie valides. Lorsque la logique est « 1 », le convertisseur recommencera le suivi (le temps de récupération maximum est approximativement égal au temps de réponse maximum de l'étape). Cette épingle a été remontée à l’intérieur.
8. Tableau des valeurs de poids (Tableau 5)
Tableau 5 Tableau des valeurs de poids
Angle de bit Angle de bit Angle de
bit 1(MSB)180,0000 6
5,6250 11 0,1758
2 90,0000 7 2,8125 12 (pour LSB 12 bits) 0,0879
3 45,0000 8 1,4063 13 0,0439
4 22,5000 9 0,7031 14 (pour LSB 14 bits) 0,02
20 5 11,2500 10 (pour LSB 10 bits) 0,3516 9. Schéma de connexion pour application typique (Fig. 6)
(1) Raccordement du convertisseur
±15V, +5V et GND doivent être connectés aux broches correspondantes du convertisseur, notez que les polarités de l'alimentation doivent être correctes, sinon le convertisseur pourrait être endommagé. Il est recommandé de connecter un condensateur de dérivation de 0,1 μF et 6,8 μF en parallèle entre chaque borne d'alimentation et la masse.
Les entrées de signaux doivent correspondre à la phase d'excitation, leur phase est la suivante :
RHi~RLo : VRsinωt
Pour la synchro :
Pour S1~S3 : sinθ sinωt
Pour S3~S2 : sin(θ+120o) sinωt
Pour S2~S1 : sin (θ+240o) sinωt
Pour le résolveur :
S1~S3为: sinθ sinωt
S2~S4为: cosθ sinωt Fig. 6 Schéma de connexion pour une application typique
Remarque : aucun signal d'entrée de RHi, RLo, S1, S2, S3 et S4 ne peut être connecté à d'autres broches par crainte d'endommager l'appareil.
(2) Interface avec l'ordinateur
Afin d'empêcher la collecte de données pendant le niveau élevé de l'impulsion d'occupation et de garantir l'acquisition de données valides, la connexion de la figure 7 peut être adoptée : (3) Application
du convertisseur
En plus d'être directement utilisé dans une mesure précise d'angle de rotation du synchro ou du résolveur, le convertisseur d'angle d'arbre peut également constituer un système de mesure à deux vitesses ou un autre système de contrôle de mesure numérique de plus grande précision.
En plus d'être directement utilisé dans la mesure précise de l'angle de rotation du synchro ou du résolveur, le convertisseur d'angle d'arbre peut également constituer un système de mesure à deux vitesses ou un autre système de contrôle de mesure numérique de plus grande précision.
La figure 8 est un exemple de système à deux vitesses composé du convertisseur. Le système à deux vitesses établi sur le principe de combinaison de mesures grossières et précises a une précision de conversion plus élevée, la figure montre le système de conversion à deux vitesses composé de deux synchros (ou résolveurs) couplés via la boîte de vitesses, de deux convertisseurs SDC et d'un deux -processeur rapide HTSL19, sa sortie atteint 19 bits.
Fig.7 Un circuit d'interface informatique externe réalisable Fig.8 Application du système à deux vitesses de SDC
La figure 9 montre un système d'asservissement à commande numérique. Il utilise la boucle de rétroaction négative du contrôle numérique constituée par SDC pour obtenir un contrôle précis de l'angle de rotation.
10. Spécifications de l'emballage (unité : mm) (Fig. 10)
Fig.9 Système d'asservissement à commande numérique Fig.10 Vue extérieure de l'emballage
11. Clé de numérotation des pièces (Fig. 11)
Fig.11 Clé de numérotation des pièces
Remarque : lorsque le signal ci-dessus la tension et la tension de référence (Z) sont non standards, elles doivent être données comme suit :
(par exemple la tension de référence 5V et la tension de signal 3V sont exprimées par -5/3)
Précautions d'emploi
Alimentez correctement, pendant la mise sous tension, connectez avec précision les pôles positifs et négatifs de l'alimentation pour éviter l'épuisement professionnel.
Pendant l'assemblage, le bas du produit doit s'adapter étroitement au circuit imprimé afin d'éviter d'endommager les broches, et une protection antichoc doit être ajoutée, si nécessaire.
Lorsque l'utilisateur passe une commande pour le produit, les indices de performances électriques détaillés doivent faire référence à la norme d'entreprise concernée.
Synchronisation/résolveur vers convertisseur numérique
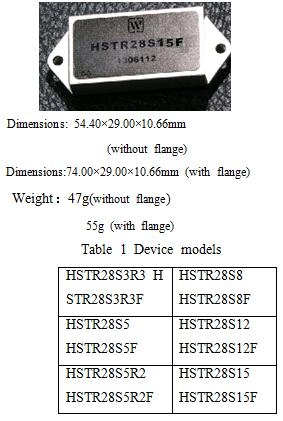
(série HSDC/HRDC27)
1. Caractéristiques (voir Fig. 1 pour la vue extérieure et Tableau 1 pour les modèles)
Résolution : 12 bits, 14 bits
Taux de suivi élevé
Intégration hybride, boîtier métallique
Trois- sortie de verrouillage d'état
Avec signal de vitesse Sortie Vel
Incomplètement compatible avec la série AD1740 Taille : 45,39 × 29,0 × 7,2 mm2
Poids : 26 g
Fig. 1 Vue extérieure de la série HSDC/HRDC27 Tableau 1 Modèles de produits
12 bits 14 bits
Synchro Resolver Synchro Resolver
HSDC2742 -412 HRDC2742 - 414 HSDC2754 -612 HRDC2754
-414 HRDC2742 -418 HRDC2754 -418 HRDC2742 -618 HRDC2754 -618 HRDC2754 -666 HRDC2754 -614 2. Champ d'application
Système d'asservissement ; système d'antenne; mesure d'angles; technologie de simulation; contrôle des canons; contrôle des machines-outils industrielles
3. Outline
La série HSDC/HRDC27 est le convertisseur numérique synchro/résolveur pour le suivi continu de la boucle d'asservissement de type II, il verrouille et produit en parallèle des données codées binaires naturelles de 12 bits ou 14 bits avec un double-32 lignes. boîtier métallique en ligne, présente les avantages d'un petit volume, d'un poids léger et d'une fiabilité élevée, etc., il est largement appliqué dans des systèmes de contrôle automatique tels que le système radar, le système de navigation, etc. La puissance de fonctionnement est de + 15 V et + 5 V CC
. . Les signaux d'entrée sont divisés en deux types : signal de synchronisation et d'excitation à 3 lignes (convertisseur SDC) ou résolveur à 4 lignes et signal d'excitation (convertisseur RDC). La sortie est un code numérique parallèle binaire. Tableau 2 Conditions nominales et conditions de fonctionnement recommandées
Max. valeur nominale absolue Tension d'alimentation Vs : ± 17,25 V
Tension logique VL : +5,5 V
Plage de température de stockage : -55 ℃~125 ℃
Conditions de fonctionnement recommandées Tension d'alimentation Vs : ± 15 V
Tension d'alimentation VL : +5 V
Valeur efficace de la tension de référence VRef : ± 10 % de la valeur nominale
Valeur efficace de la tension du signal Vi : ±5 % de la valeur nominale
Fréquence de référence f* : 50 Hz~2,6 kHz
Plage de température de fonctionnement TA : -40~+85℃,-55~+105℃
Remarque : * l'indique peut être personnalisé selon les besoins de l'utilisateur.
4. Performances techniques (Tableau 2, Tableau 3)
Tableau 3 Caractéristiques électriques
Caractéristiques Norme militaire d'entreprise HSDC/HRDC2742 (Q/HW30859-2006) Norme militaire d'entreprise HSDC/HRDC2754 (Q/HW30832-2006) Unité Remarques
Performances du convertisseur Précision ±8,5 ±5,3 Minute angulaire Vitesse de suivi 25(min)12(min)rps à Excitation 400 Hz Résolution 12 14 bits Fréquence du signal et de référence 50~2600 50~2600 Hz En option* Tension d'entrée du signal 11,8, 26, 90 11,8, 26, 90 V En option**
Tension d'entrée de référence 11,8, 26, 115 11,8, 26, 115
V En option**
Réponse échelonnée 100 150 ms Constante d'accélération 82000 39000 s-2 Consommation électrique 0,86max 1,3max W Largeur d'impulsion occupée 1max 1max µs Capacité de charge de sortie numérique 2max 2max TTL Notes: * Pour le convertisseur avec une autre fréquence de fonctionnement telle que 50 Hz, 2 kHz, etc., ses paramètres dynamiques sont différents, qui peuvent être fournis selon les besoins de l'utilisateur ;
** indique qu'il peut être personnalisé selon les besoins de l'utilisateur.
5. Principe de fonctionnement (Fig. 2)
Le signal d'entrée de synchronisation (ou signal d'entrée du résolveur) est converti en signal orthogonal via une isolation différentielle interne :
V1=KE0sinθ sinωt,V2=KE0cosθ sinωt
Où θ est l'angle d'entrée simulé.
Ces deux signaux et l'angle numérique φ du compteur interne réversible sont multipliés dans le multiplicateur des fonctions sinus et cosinus et sont traités en erreurs :
KE0sinθ cosφ sinωt-KE0cosθ sinφ sinωt=KE0sin(θ-φ) sinωt
Les signaux sont envoyés à l'oscillateur contrôlé en tension après amplification, discrimination de phase, filtration d'intégration. Si θ-φ≠0, l'oscillateur contrôlé en tension modifie les données dans le compteur réversible avec les impulsions de sortie jusqu'à ce que θ-φ devienne zéro dans la précision du convertisseur, pendant ce processus, le convertisseur suit le changement de l'angle d'entrée θ tout le temps.
Fig.2 Schéma fonctionnel du principe de fonctionnement
Fonction de transfert du convertisseur
Fonction
en boucle fermée
Méthode de transfert de données et séquence temporelle
Il existe deux méthodes pour lire les données effectives dans le convertisseur : la lecture synchrone et la lecture asynchrone.
(1) Mode inhibition (lecture synchrone) :
R : le convertisseur est connecté avec un bus 16 bits. Bysel est connecté au « 1 » logique.
est réglé sur le « 0 » logique à partir du « 1 » logique (verrouillage des données), attendez 1 μs ; réglé sur le « 0 » logique, le verrou à l'intérieur du convertisseur permet la sortie des données ; lire des données 12 bits ou 14 bits ; réglez Inhibit sur le « 1 » logique afin de vous préparer à la lecture des prochaines données valides (voir le diagramme de séquence temporelle pour le transfert 16 bits).
B : le convertisseur est connecté au bus 8 bits, les bits D1 ~ D8 sont connectés au bus de données et le reste est vide.
est réglé sur le « 0 » logique à partir du « 1 » logique (verrouillage des données), attendez 1 μs ; réglé sur « 0 » logique, les données de verrouillage à l'intérieur du convertisseur autorisent la sortie ; si Byse1 est réglé sur « 1 » logique, le convertisseur lit directement les données de 8 bits supérieures, si Byse1 est réglé sur « 0 » logique, le convertisseur lit les bits restants, ajoute automatiquement zéro pour les bits incomplets ; réglé sur le « 1 » logique afin de se préparer à la lecture des prochaines données valides (voir Fig. 3 et Fig. 4 pour la séquence de temps de transfert de 8 bits).
Fig. 3 Diagramme chronologique d'un transfert sur bus 16 bits Fig. 4 Diagramme chronologique d'un transfert sur bus 8 bits
(2) Mode occupé (lecture asynchrone)
En mode de lecture asynchrone, est réglé sur « 1 » logique ou est vacant, si la boucle interne est dans l'état stable ou si les données de sortie sont valides doit être déterminé par l'état du signal Busy Busy. Lorsque le signal occupé est à un niveau élevé, cela indique que les données sont en cours de conversion et que les données à ce moment sont des données instables et invalides ; lorsque le signal occupé est à un niveau bas, cela indique qu'une conversion de données est terminée, les données à ce moment sont stables et valides et peuvent être lues. Une fois qu'un niveau haut apparaît en mode Occupé pendant la lecture, la lecture de ce temps n'est plus valide. En mode de lecture asynchrone, la sortie Busy est un train d'impulsions de niveau TTL, la largeur entre les deux est liée à la vitesse de rotation. De même, il existe également deux méthodes d'utilisation du bus 8 bits et du bus 16 bits, en cas de sortie de données valide, la lecture des données est également contrôlée par ,
Fig.5 Diagramme chronologique pour transfert de bus 16 bits Fig.6 Diagramme chronologique pour transfert de bus 8 bits
6. Courbe MTBF (Fig. 7)
Fig. 7 Courbe MTBF-température 7. Désignation des broches (Fig. 8, Tableau 3)
Fig. 8 Broches (vue de dessous)
(Remarque : selon GJB/Z299B-98, bon état de terre envisagé)
Tableau 3 Désignation des broches
Broche Symbole Fonction Broche Symbole Fonction
1~14 D1~D14 Sortie numérique 24 Bysel Sélection de bit
15 RLo Signal d'excitation entrée 25 NC Laisser non connecté
16
RHi Entrée de signal d'excitation 26 Data gate
17 S4 Entrée de signal 27 Busy Sortie d'impulsion d'occupation
18 S3 Entrée de signal 28 Commande de verrouillage de données
19 S2 Entrée de signal 29 +15V Alimentation
20 S1 Entrée de signal 30 GND Masse d'alimentation
21 NC Laisser non connecté 31 -15V Alimentation
22 Vel Sortie de tension de vitesse 32 +5 V Alimentation
23 Boîtier Mise à la terre du boîtier Remarques : ① Pour un convertisseur 12 bits, laissez les broches 13 et 14 non connectées.
② Pour le convertisseur SDC, laissez la broche 17 déconnectée.
③ Alimentation : ±15 V, +5 V, GND, l'alimentation ne doit pas être connectée à l'envers, sinon les appareils seront endommagés.
④ Sortie numérique binaire : elle est divisée en sortie 12 bits et 14 bits.
⑤ RHi, RLo : entrée du signal d'excitation.
⑥ S1, S2, S3, S4 : entrée de signal de synchro/résolveur (S4 reste déconnecté pour la synchro).
⑦ Occupé : signal d'occupation
Ce signal indique si le nombre binaire sorti du convertisseur est valide ou non. Lorsque Busy est au niveau haut, cela indique que le convertisseur effectue une conversion de données, la sortie de données à ce moment n'est pas valide ; lorsque Busy est à un niveau bas, les données dans le convertisseur sont stables et la sortie de données à ce moment est valide.
⑧ Data gate
Cette broche est la broche d'entrée de la logique de contrôle, sa fonction est de transmettre des données au convertisseur pour réaliser un contrôle à trois états. Le niveau bas est valide, les données de sortie du convertisseur occupent le bus de données. Lorsqu'elle est au niveau haut, la broche de sortie de données du convertisseur est dans trois états, l'appareil n'occupe pas le bus.
⑨ Contrôle de verrouillage des données (signal d'inhibition)
Cette broche est la broche d'entrée de la logique de contrôle, sa fonction est de transmettre des données en externe au convertisseur pour réaliser un contrôle de verrouillage ou de dérivation en option.
À un niveau élevé, les données de sortie du convertisseur sortent directement sans verrouillage ; à bas niveau, les données de sortie du convertisseur sont verrouillées, les données ne sont pas mises à jour, mais la boucle interne n'est pas interrompue et le suivi fonctionne tout le temps. a connecté une résistance de rappel à l'intérieur du convertisseur (le fait que l'appareil utilise le bus de données, c'est-à-dire le moment où il émet les données dépend de l'état de).
⑩ Byse1 : fin de la sélection des bits
Il s'agit d'une extrémité de contrôle spécialement conçue pour connecter le convertisseur avec des données 8 bits ou un bus de données 16 bits. Lorsque le convertisseur est connecté à un bus de données 16 bits, Byse1 est extrait en interne, le convertisseur peut directement produire des données 12 bits ou 14 bits ; lorsque le convertisseur est connecté à un bus de données 8 bits, Byse1 est à un niveau haut, le convertisseur émet des données de 8 bits supérieurs (D1 ~ D8), lorsque Byse1 est à un niveau bas, le convertisseur émet des données sur les bits restants (copie les données des bits restants aux bits D1 ~ D8), et remplit automatiquement zéro pour les données des bits courts. Il convient de noter qu'il est uniquement nécessaire de connecter D1 ~ D8 lorsque le convertisseur est connecté à un bus de données 8 bits, les autres broches de données restent non connectées.
8. Tableau des valeurs de poids (Tableau 4)
Tableau 4 Tableau des valeurs de poids
Bit Angle Bit Angle Bit Angle
1 (
MSB) 180,0000 6 5,6250 11 0,1758
2 90,0000 7 2,8125 12 ( pour LSB 12 bits) 0,0879
3 45,0000 8 1,4063 13 0,0439 4 22,5000
9 0,7031 14 (pour LSB 14 bits) 0,0220
5 11,2500 10 0,3516 9. Schéma de connexion pour une application typique (Fig. 9)
En plus d'être directement utilisé dans la mesure précise de l'angle de rotation du synchro ou du résolveur, le convertisseur d'angle d'arbre peut également constituer un système de mesure à deux vitesses ou un autre système de contrôle de mesure numérique de plus grande précision. La figure 9 est un exemple de système à deux vitesses composé du convertisseur. Le système à deux vitesses établi sur le principe de combinaison de mesures grossières et précises a une précision de conversion plus élevée. La Fig.9 montre le système de conversion à deux vitesses composé de deux synchros (ou résolveurs) couplés via la boîte de vitesses, de deux convertisseurs SDC et d'un processeur à deux vitesses HTSL19, sa sortie atteint 19 bits. Fig. 9 Application du système à deux vitesses du SDC
10. Spécifications de l'emballage (unité : mm) (Fig. 10)
Fig.10 Spécifications de l'emballage
Tableau 5 Matériaux du boîtier
Modèle du boîtier Embase Placage de l'en-tête Couvercle Placage du couvercle Matériau de la broche Placage de la broche Style d'étanchéité Remarques
UP4529- 32a Kovar (4J29) Au Alliage Fe-Ni (4J42) Au Kovar (4J29) Au Emballage assorti Le revêtement de la broche 23 est Au
Remarque : la température des broches à souder ne doit pas dépasser 300 ℃ en 10 s.
11. Légende de numérotation des pièces (Fig. 11)
Fig.11 Légende de numérotation des pièces
Remarque : lorsque la tension du signal et la tension de référence (Z) ci-dessus ne sont pas standard, elles doivent être indiquées comme suit :
(par exemple, la tension de référence 5 V et la tension du signal 3 V doivent être exprimées par -5/3)
Précautions d'utilisation
Alimentez correctement, pendant la mise sous tension, connectez avec précision les pôles positifs et négatifs de l'alimentation pour éviter l'épuisement.
Connexion du convertisseur
±15V, +5V et GND doivent être connectés aux broches correspondantes du convertisseur, notez que les polarités de l'alimentation doivent être correctes, sinon le convertisseur pourrait être endommagé. Il est recommandé de connecter une capacité de dérivation de 0,1 μF et 6,8 μF en parallèle entre chaque borne d'alimentation et la terre. La source de signal et d'excitation peut être connectée aux extrémités S1, S2, S3 et S4 et RHi et RLo avec une erreur de 5 %. Il est uniquement nécessaire de connecter D1 ~ D8 lorsque le convertisseur est connecté à un bus de données 8 bits, les autres broches de données restent vacantes.
Lorsque le convertisseur est connecté au bus de données 16 bits, D1 ~ D14 ou (D1 ~ D12) doivent tous être connectés.
L'entrée du signal doit correspondre à la phase de l'excitation afin qu'ils puissent être correctement connectés au convertisseur, leurs phases sont les suivantes :
RHi~RLo : VRsinωt
Pour la synchro :
Pour S1~S3 : sinθ sinωt
Pour S3~S2 : sin(θ+120o) sinωt
Pour S2~S1 : sin(θ+240o) sinωt
Pour le résolveur :
Pour S1~S3 : sinθ sinωt
Pour S2~S4 : cosθ sinωt
Remarque : aucun signal d'entrée de RHi, RLo, S1, S2, S3 et S4 ne peut être connecté à d'autres broches par crainte d'endommager l'appareil.
Pendant l'assemblage, le bas du produit doit s'adapter étroitement au circuit imprimé afin d'éviter d'endommager les broches, et une protection antichoc doit être ajoutée, si nécessaire.
Lorsque l'utilisateur passe une commande pour le produit, les indices de performances électriques détaillés doivent faire référence à la norme d'entreprise concernée.
Convertisseur R/D (H2S80)
1. Caractéristiques (voir Fig. 1 pour la vue extérieure et Tableau 1 pour les modèles)
Résolution optionnelle de 10, 12, 14 et 16 bits
Taux de suivi : max. 1040 r/sec
Paramètres dynamiques : conçus par l'utilisateur
Haute impédance d'entrée, sortie de verrouillage à trois états
Boîtier DDIP scellé en métal résistant au brouillard salin à 40 fils
Compatible avec la série ADC2S80 de la société américaine AD Taille : 53 × 20 × 5,3 mm2
Poids : 18 g
Fig. 1 Vue extérieure du H2S80 2. Champ d'application
Système d'asservissement de missile ; système électronique de commande de vol ; système de contrôle radar; système de navigation maritime ; surveillance des antennes ; système de contrôle de l'artillerie; machines-outils à commande numérique (CNC); système robotisé.
3. Aperçu
Le convertisseur R/D à suivi continu de boucle servo H2S80 de type II est conçu et fabriqué en adoptant le processus MCM, le dispositif du noyau est la puce spéciale développée indépendamment par notre société, la disposition des broches est compatible avec le produit AD2S80 de la société américaine AD, 10, 12, Sortie de verrouillage de données binaires naturelles parallèles de 14 et 16 bits (résolution en option), boîtier hermétique en métal DIL à 40 lignes, présente les avantages d'une haute précision, d'une faible consommation d'énergie, d'un petit volume, d'un poids léger et d'une haute fiabilité, etc., et peut être largement utilisé pour le contrôle électronique du système d'avion, de navire, d'artillerie, de missile, de radar, de char, etc. Tableau 1 Conditions nominales et conditions de fonctionnement recommandées
Max. valeur nominale absolue Tension d'alimentation logique VL : 7 V
Tension d'alimentation Vs : ± 13,5 V
Tension du signal Vi : 2 V ± 20 %
Tension de référence : VRef : 2 V ± 20 %
Fréquence de fonctionnement f : 50 ~ 20 000 Hz
Température de stockage Tstg : 65 ~ 150 ℃
Conditions de fonctionnement recommandées Tension d'alimentation logique VL : 5 ± 0,5 V
Tension d'alimentation Vs : ± 12 ±0,75 V
Tension du signal Vi : 2 V ± 10 %
Tension de référence : VRef : 2 V ± 10 %
Fréquence de fonctionnement f : 50 ~ 20 000 Hz
Plage de température de fonctionnement (TA) : 55 ~ 125 ℃
4. Caractéristiques électriques (Tableau 1, Tableau 2)
Tableau 2 Caractéristiques électriques
Caractéristiques H2S80 Caractéristiques de l'unité H2S80
Norme militaire d'entreprise (Q/HW30974-2007) Unité
Résolution
En option 10, 12, 14 et 16 bits ±21 minutes+1LSB(10 bits) Tension du signal 2V±10% V ±8 minutes+1LSB(12 bits) Tension de référence 2V±10% V Précision ±4 minutes+1LSB(14 bits) bit Niveau d'entrée numérique Compatible avec TTL ±2 minutes+1LSB (16 bits) Vitesse de suivi 0~1040 (10 bits) r/sec Niveau de sortie numérique Logique haut ≥3,3
Logique bas ≤0,7 V
0~260 (12 bits) 0 ~65 (14 bits) 0~16 (16 bits) Alimentation +12, 12, +5 V Plage de fréquence de fonctionnement 50~20 000 Hz Consommation électrique
450 mW
5. Principe de fonctionnement (Fig. 2 et Fig. 3)
Le signal d'entrée de la synchro (ou du résolveur) est converti en signal orthogonal via l'isolation différentielle interne :
Vsin-KE0sin(ωt+α) sinθ (sin)
Vcos- KE0sin(ωt+α) cosθ (cos)
Où θ est l'angle d'entrée analogique.
Ces deux signaux et l'angle numérique φ du compteur interne réversible sont multipliés dans le multiplicateur des fonctions sinus et cosinus et sont traités en erreur :
KE0sin(ωt+α) (sinθ cosφ -cosθ sinφ)
soit KE0sin(ωt+α) sin(θ -φ)
Il est envoyé à l'oscillateur contrôlé en tension après amplification, discrimination de phase et filtration d'intégration. Si θ-φ≠0, l'oscillateur contrôlé en tension produira les impulsions et le compteur réversible les compte jusqu'à ce que θ-φ devienne zéro dans la précision de la convertisseur. Dans ce processus, le convertisseur suit en permanence le changement d’angle d’entrée. Fig.2 Schéma fonctionnel du principe de fonctionnement
Mode lecture :
Deux méthodes suivantes sont disponibles pour le transfert de données :
(1) mode
Après 640 ns de logique basse, les données de sortie sont valides et le convertisseur réalise le transfert de données via Enable. Une fois l'inhibition relâchée, le système générera automatiquement une impulsion dont la largeur est égale à celle de l'impulsion d'occupation pour la mise à jour des données.
(2) Mode Bust :
sur le front montant de l'impulsion Busy, le compteur réversible à trois états compte ; sur le front descendant de l'impulsion d'occupation, il génère en interne une impulsion de verrouillage dont la largeur est égale à celle de l'impulsion d'occupation pour mettre à jour les données du verrou à trois états, la séquence temporelle du transfert de données est représentée sur la figure 3, en d'autres termes , après 600 ns de logique d'occupation faible, le transfert stable des données est valide. Dans le processus de lecture, une fois qu'un niveau haut apparaît en mode Occupé, la lecture de ce temps n'est plus valide. En mode de lecture asynchrone, la sortie Busy est un train d'impulsions de niveau CMOS, la largeur d'impulsion est liée à la vitesse de rotation.
Fig. 3 Diagramme chronologique pour la lecture du bus
6. Courbe MTBF (Fig. 4)
Fig. 4 Courbe MTBF-température 7. Désignation des broches (Fig. 5, Tableau 3)
Fig. 5 Broches (vue de dessous)
(Remarque : selon GJB/Z299B-98, bon état de terre prévu)
Tableau 3 Désignation des broches
Broche Symbole Fonction Broche Symbole Fonction Broche Symbole Fonction
1 Réf/I Entrée du signal de référence 15 D7 Sortie numérique 7 29 DG Masse numérique ⑧
2 Entrée du discriminateur Démo/I 16 D8 Sortie numérique 8 30 SC1 Entrée de sélection de résolution ①
3 Entrée d'erreur AC Acer/O 17 D9
Sortie numérique 9 31 SC2 4 cos Entrée de signal cosinus 18 D10 Sortie numérique 10 32 NC Laisser non connecté
5 AG Masse analogique ⑧ 19 D11 Sortie numérique 11 33 Busy Sortie de signal d'occupation ④
6 SG Masse de signal ⑧ 20 D12 Sortie numérique 12 34 Sens Signal de sens de comptage sortie ⑤
7 sin Entrée de signal sinusoïdal 21 D13 Sortie numérique 13 35 Ripclk Sortie de signal zéro bit ⑥
8 +VS Alimentation +12V ⑦ 22 D14 Sortie numérique 14 36 -VS Alimentation -12V ⑦
9 D1 Sortie numérique 1 (MSB) 23 D15 Sortie numérique 15 37 Vco/I Entrée oscillateur commandé en tension
10 D2 Sortie numérique 2 24 D16 Sortie numérique bit 16 (LSB) 38 Inte/I Entrée intégrateur
11 D3 Sortie numérique 3 25 +VL +5V alimentation ⑦ 39 Inte/O Sortie intégrateur
12 D4 Sortie numérique 4 26 Activer l'entrée de signal ② 40 Sortie du discriminateur
démo/ sortie 13① D5 Sortie numérique 5 27 NC Laisser non connecté 14① D6 Sortie numérique 6 28 Entrée de signal statique ③ Remarque : ① SC1 et SC2 pour l'entrée de sélection de résolution ont été connectés avec une résistance de rappel en interne.
Résolution SC1 SC2
10 0 0
12 0
1
14 1 0
16 1 1
② Activer l'entrée du signal, cette broche est la broche d'entrée logique du contrôle de contrôle des données, sa fonction est d'effectuer un contrôle externe à trois états sur les données de sortie du convertisseur. Le niveau bas est valide, les données de sortie du convertisseur occupent le bus de données. Lorsqu'elle est à un niveau élevé, la broche de sortie de données du convertisseur apparaît dans un état haute impédance, l'appareil n'occupe pas le bus. Le temps de retard d’activation et de libération est de 600 ns (max).
③ Entrée de signal statique, cette broche est la broche d'entrée de la logique de contrôle du verrouillage des données, sa fonction est d'effectuer le contrôle de sélection du verrouillage ou du contournement des données de sortie du convertisseur. À un niveau élevé, les données de sortie du convertisseur sont directement sorties sans verrouillage ; à bas niveau, les données de sortie du convertisseur sont verrouillées, les données ne sont pas mises à jour, mais la boucle interne n'est pas interrompue et le suivi fonctionne tout le temps, a été connecté à une résistance de rappel en interne. Après un délai de 600 ns (max) du front descendant du signal statique, les données deviennent stables (que l'appareil occupe ou non le bus de données, c'est-à-dire quand sort-il les données dépend de l'état d'activation).
④ Sortie de signal « occupé », ce signal indique si la sortie de code binaire du convertisseur est valide ou non. Lorsque Busy est au niveau haut, cela indique que le convertisseur effectue une conversion de données, la sortie de données à ce moment n'est pas valide ; lorsque Busy est à un niveau bas, cela indique que les données dans le convertisseur ont été stables et que la sortie des données à ce moment est valide, la largeur d'impulsion est de 400 ns.
⑤ Direction : sortie du signal de direction de comptage, le niveau haut indique que le convertisseur ajoute le compte et le niveau bas indique que le convertisseur déduit le compte.
⑥ RIPCLK : sortie de signal zéro : lorsque les données de sortie augmentent de tout « 1 » à tout « 0 », ou que les données de sortie diminuent de tout « 0 » à tout « 1 », la sortie est une impulsion positive, la largeur d'impulsion est de 200 μs. .
⑦Puissance : +VS
+12V alimentation
12mA
-VS -12V alimentation 18mA
+VL +5V alimentation 10mA
⑧ Terre : la masse analogique AG et la masse numérique DG doivent être connectées en externe à la terre d'alimentation.
8. Schéma de connexion pour une application typique (Fig. 6)
Fig. 6 Schéma de connexion pour une application typique
(1) Réglage du filtre
15kΩ≤R1=R2≤56kΩ
C1=C2= (unité R1 : Ω ; fRef est la fréquence de la source d'excitation signal, unité : Hz)
(2) Réglage du gain
R4=
EDC=160×10-3
=40×10-3
=10×10-3
=2,5×10-3 (résolution 10 bits)
(résolution 12 bits )
(Résolution 14 bits)
(Résolution 16 bits)
(3) Entrée du signal de référence
R3=100kΩ
C3>
(4) Réglage de la valeur max. le taux de suivi
T est le maximum. taux de suivi (unité : r/sec), mais ne doit pas dépasser 1/16 de la fréquence de référence. Afin que le produit soit au maximum. taux de suivi et la tension de vitesse angulaire atteint 8 V, il est requis :
R6 =
p = 1024
= 4096
= 16384
= 65536 (résolution 10 bits)
(résolution 12 bits)
(résolution 14 bits)
(résolution 16 bits) Tableau 4 Réglage du taux de suivi
Résolution Proportion de la fréquence de référence par rapport à la fréquence de bande passante fBW
10 2,5:1
12 4:1
14 6:1
16 7,5:1
(5) Réglage de la boucle de sélection de bande passante
La proportion sélectionnée de la fréquence de référence par rapport à la fréquence de bande passante du produit ne doit pas être inférieure à la spécifié dans le tableau 4.
Par exemple : sélectionnez 50 Hz pour une résolution de 14 bits et une fréquence de référence de 400 Hz pour le produit.
C4= (unité de R6 : kΩ)
C5=5×C4
R5=
(6) Réglage du filtre VCo
C6=470pF,R7=68Ω
(7) Mise à zéro
Afin d'éliminer la dérive zéro du produit, il peut être réglé à l'aide du potentiomètre R9, la méthode est la suivante : court-circuiter les broches 4 et 1 du produit, court-circuiter les broches 7 et 6 (équivalent à un angle d'entrée de 0o), réguler le potentiomètre R9. pour remettre les données de sortie du produit à zéro.
Pour l'alimentation connectée aux broches +VS et -VS, sa tension doit être de ±12 V et ne doit pas être connectée en sens inverse. L'alimentation logique numérique VL est connectée à l'emplacement du +5V. Entre l'alimentation et la terre, un condensateur céramique de 0,1 µF et un condensateur électrolytique de 6,8 µF doivent être connectés en parallèle.
9. Spécifications de l'emballage (unité : mm) (Fig. 7, Tableaux 5 et 6)
Fig. 7 Vue extérieure et dimensions de l'emballage Tableau 5 Spécification de l'emballage
Symbole Valeur
Min. Nominal Max.
A 5,5
Φb 0,35 0,55
D 53,8
E 20,0
e 2,54 e1 15,24 L 5 Tableau 6 Matériaux du boîtier
Modèle du boîtier Embase Placage de l'embase Couvercle Placage du couvercle Matériau de la broche Placage des broches Style d'étanchéité Remarques
UP5320- 40 Revêtement Ni 4J42 Revêtement Ni chimique 4J42 Revêtement Au 4J42 Emballage assorti Base plus trois perles de verre solides
Remarque : la température des broches à souder ne doit pas dépasser 300 ℃ en 10 s.
10. Clé de numérotation des pièces (Fig. 8)
Fig. 8 Clé de numérotation des pièces
Précautions d'utilisation
Alimentez correctement, pendant la mise sous tension, connectez avec précision les pôles positifs et négatifs de l'alimentation pour éviter tout épuisement.
Pendant l'assemblage, le bas du produit doit s'adapter étroitement au circuit imprimé afin d'éviter d'endommager les broches, et une protection antichoc doit être ajoutée, si nécessaire.
Ne pliez pas les broches pour éviter que l'isolant ne se brise, ce qui affecterait la propriété d'étanchéité.
Lorsque l'utilisateur passe une commande pour le produit, les indices de performances électriques détaillés doivent faire référence à la norme d'entreprise concernée.
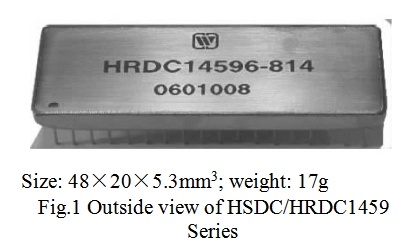
Synchronisation/résolveur vers convertisseur numérique
(série HSDC/HRDC1459)
1. Caractéristiques (voir Fig. 1 pour la vue extérieure et Tableau 1 pour les modèles)
Conversion d'isolation différentielle interne
Résolution de 16 bits
Précision : 2 minutes angulaires
Sortie de verrouillage à trois états
Haute continue vitesse de suivi
Boîtier DDIP scellé en métal résistant au brouillard salin à 36 fils
Pin-To-Pin compatible avec le modèle SDC14560 de la société DDC Taille : 48,2 × 20 × 5,3 mm3 ; poids : 17 g
Fig.1 Vue extérieure de la série HSDC/HRDC1459
2. Champ d'application
Système de servocommande militaire ; surveillance des antennes ; système de contrôle radar; système de navigation pour navires militaires; système de contrôle des canons; système d'instruments de vol ; système électronique aéronautique; machines à commande numérique informatisée (CNC); technologie robotique.
3. Aperçu
Le convertisseur synchro/résolveur vers numérique série HSDC/HRDC1459 est un dispositif de conversion intégré hybride pour le suivi continu conçu sur le principe du servo modèle II. Les produits de cette série sont conçus et fabriqués selon le processus MCM, les éléments centraux adoptent une puce spéciale développée indépendamment par notre institut. La disposition des broches est compatible avec les produits de la série SDC14560 de la société américaine DDC, sortie de verrouillage de données de code binaire naturel parallèle 16 bits, boîtier métallique DIP 36 fils totalement scellé, présente les avantages d'une haute précision, d'un petit volume, d'une faible consommation d'énergie et d'un poids léger. et haute fiabilité, etc., et peut être largement utilisé dans des armes stratégiques et tactiques importantes telles que les avions, les navires de guerre, les canons, les missiles, les radars, les chars, etc.
4. Performances électriques (tableau 1, tableau 2)
Max. valeur nominale absolue Tension d'alimentation logique VL : +7 V
Tension d'alimentation Vs : ± 17,5 V
Tension de signal Vi : valeur nominale ±20 %
Tension de référence VRef : valeur nominale ±20 %
Fréquence de fonctionnement f : valeur nominale ±20 %
Température de stockage Tstg : -65 ~150℃
Conditions de fonctionnement recommandées Tension d'alimentation logique VL : 5±0,5 V
Tension d'alimentation Vs : ¡À15¡À0,75 V
Tension de signal Vi : valeur nominale ±10 %
Tension de référence VRef : valeur nominale ±10 %
Fréquence de fonctionnement f* : valeur nominale ±10 %
Plage de température de fonctionnement (TA) : -55 ~ 125 ℃
Remarque : * indique qu'il peut être personnalisé selon les besoins de l'utilisateur.
Tableau 2 Caractéristiques électriques
Caractéristiques Condition
(VS=±15V, VL=+5V) Série HSDC14569
Norme militaire (Q/HW20725-2006)
Min. Max.
Résolution Code numérique parallèle binaire 16 bits Précision ±10 % de la tension du signal, de la tension de référence et de la plage de fluctuation de la fréquence de fonctionnement -2 minutes angulaires +2 minutes angulaires
Plage de fréquence de référence 50 Hz 2 600 Hz
Plage de tension de référence 2 V 115 V
Impédance d'entrée de référence 4,4 kΩ 129,2 kΩ
Plage de tension du signal 2 V 90 V
Impédance d'entrée du signal 4,4 kΩ 102,2 kΩ
Déphasage signal/référence -70o +70o
Niveau logique d'entrée Logique « 1 » ≥3,3 V Logique « 0 » ≤0,8 V
entrée 0 0,8 V
entrée 0 0,8 V
entrée 0 0,8 V
Niveau logique de sortie Logique « 1 » ≥3,3 V Logique « 0" ≤0,8V
Sortie de code d'angle numérique Logique "1" ≥3,3V Logique "0" ≤0,8V
Conversion de sortie de signal occupé (CB) 200ns 600ns
Détection de défaut Sortie de bit Logique "0" indique un défaut Capacité de chargement 3TTL
Vitesse de suivi 2,5 r/ sec
Constante d'accélération
12500
Temps de stabilisation 850 ms
Sortie de tension de vitesse angulaire (Vel) -10 V + 10 V
Courant Vs = + 15 V 10 mA
Vs = -15 V 15 mA
VL = + 5 V 20 mA
5. Réponse échelonnée
Lorsqu'une étape dans le signal d'entrée ou la mise sous tension initiale se produit, le la réponse sera inhibée en raison de la limitation du taux de suivi maximum. Le processus d'oscillation de l'angle numérique de sortie est illustré à la Fig. 2 :
Fig. 2 Courbe de réponse échelonnée
6. Principe de fonctionnement (Fig. 3)
Le signal d'entrée de la synchro (ou du résolveur) est converti en signal orthogonal via le différentiel interne. isolement:
Vsin=KE0sin(ωt+α) sinθ (sin)
Vcos=KE0sin(ωt+α) cosθ (cos)
Où θ est l'angle d'entrée analogique.
Ces deux signaux et l'angle numérique φ du compteur interne réversible sont multipliés dans le multiplicateur des fonctions sinus et cosinus et sont traités en erreur :
KE0sin(ωt+α) (sinθ cosφ -cosθ sinφ)即KE0sin(ωt+α) sin(θ -φ)
Ce signal est envoyé à l'oscillateur contrôlé en tension après amplification, discrimination de phase, filtration d'intégration. Si θ-φ≠0, l'oscillateur contrôlé en tension produira des impulsions et le compteur réversible les compte jusqu'à ce que θ-φ=0 dans la précision du convertisseur. Dans ce processus, le convertisseur suit en permanence le changement d’angle d’entrée.
Mode de lecture :
Deux méthodes suivantes sont disponibles pour le transfert de données :
(1) mode
Après 640 ns de logique basse, les données de sortie sont valides et le convertisseur réalise le transfert de données via et . Une fois l'inhibition relâchée, le système générera automatiquement une impulsion dont la largeur est égale à celle de l'impulsion d'occupation pour la mise à jour des données.
(2) Mode buste :
Au front montant de l'impulsion d'occupation, le compteur réversible à trois états compte ; sur le front descendant de l'impulsion d'occupation, il génère en interne une impulsion de verrouillage dont la largeur est égale à celle de l'impulsion d'occupation pour mettre à jour les données du verrou à trois états, la séquence temporelle du transfert de données est représentée sur la figure 4, en d'autres termes , après 600 ns de logique d'occupation faible, le transfert stable des données est valide. En mode de lecture asynchrone, la sortie Busy est un train d'impulsions de niveau CMOS, les largeurs de ses niveaux haut et bas dépendent de la fréquence de fonctionnement et de la vitesse de rotation de l'appareil sélectionné.
Fig. 3 Schéma fonctionnel du principe de fonctionnement
Fig.4 Séquence temporelle du transfert de données
7. Courbe MTBF (Fig. 5)
Fig. 5 Courbe MTBF-température 8. Désignation des broches (Fig. 6, Tableau 3)
Fig. 6 Broches (vue de dessous)
(Remarque : selon GJB/Z299B-98, bon état de terre prévu)
Tableau 3 Désignation des broches
Broche Symbole Signification Broche Symbole Signification
1 S1 Entrée résolveur S1 (ou entrée synchro S1) 25 Activer le contrôle du niveau bas Chiffres de 8 bits
2 S2 Entrée du résolveur S2 (ou entrée de synchronisation S2) 26 Activer le contrôle des chiffres élevés de 8 bits
3 S3 Entrée du résolveur S3 (ou entrée de synchronisation S3) 27 RIPCLK Sortie de signal zéro bit
4 S4 Entrée du résolveur S4 (laisser non connectée ) 28 VL +5V alimentation
5~18 D1~D14 Sortie numérique 1 (MSB)-14 29 GND Masse
19 RHi Extrémité haute de l'entrée du signal de référence 30 NC Vacant
20 RLo Extrémité inférieure de l'entrée du signal de référence 31 -Vs -15V alimentation
21 D15 Sortie numérique 15 32 Alimentation -15 V + 15 V
22 D16 Sortie numérique 16 (LSB) 33 Entrée de signal statique
23 Vel Sortie de signal de tension à vitesse angulaire 34 Sortie de bit de détection de défaut
24 GB Sortie de signal d'occupation 36-36 NC Libre
Remarques : D1~D16 Extrémité de sortie du code d'angle numérique du système binaire parallèle
S1, S2, S3, S4 Entrée de signal du résolveur (ou de la synchronisation)
RHi Extrémité supérieure de l'entrée du signal de référence
RLo Extrémité inférieure du signal de référence saisir
Entrée de signal activée par les chiffres inférieurs de 8 bits, cette broche est la broche d'entrée logique du contrôle de contrôle des données, sa fonction est d'effectuer un contrôle à trois états en externe sur les données de sortie inférieures de 8 bits du convertisseur. Le niveau bas est valide, les données de sortie faibles de 8 bits du convertisseur occupent le bus de données. Lorsqu'il est à un niveau élevé, la broche de sortie de données faible de 8 bits du convertisseur apparaît dans un état à haute impédance, l'appareil n'occupe pas le bus. Le temps de retard d’activation et de libération est de 600 ns (max).
Entrée de signal activée par chiffres de 8 bits élevés, cette broche est la broche d'entrée logique du contrôle de contrôle des données, sa fonction est d'effectuer un contrôle à trois états en externe sur les données de sortie 8 bits supérieures du convertisseur. Le niveau bas est valide, les données de sortie élevées de 8 bits du convertisseur occupent le bus de données. Lorsqu'il est à un niveau élevé, la broche de sortie de données haute 8 bits du convertisseur apparaît dans un état haute impédance, l'appareil n'occupe pas le bus. Le temps de retard d’activation et de libération est de 600 ns (max).
entrée de signal statique, cette broche est la broche d'entrée de la logique de contrôle du verrouillage des données, sa fonction est d'effectuer le contrôle de sélection du verrouillage ou du contournement des données de sortie du convertisseur. À un niveau élevé, les données de sortie du convertisseur sont directement sorties sans verrouillage ; à bas niveau, les données de sortie du convertisseur sont verrouillées, les données ne sont pas mises à jour, mais la boucle interne n'est pas interrompue et le suivi fonctionne tout le temps, a été connecté à une résistance de rappel en interne. Après un délai de 600 ns (max) du front descendant du signal statique, les données deviennent stables (le fait que l'appareil occupe le bus de données, c'est-à-dire quand sort-il les données dépend de l'état de et).
Sortie du signal CB « Busy », ce signal indique si la sortie du code binaire du convertisseur est valide ou non. Une fois que le changement d'entrée angulaire atteint 0,33 minute angulaire, l'extrémité CB émet une impulsion positive d'une largeur de 400 ns (typique), lorsque CB est à un niveau élevé, cela signifie que le convertisseur est en cours de conversion, à ce moment, les données de sortie sont invalides. ; après le front descendant du signal CB retarde 600 ns (max.), les données deviennent stables, à ce moment, les données de sortie mises à jour sont valides.
Sortie du bit de détection de défaut, le niveau haut indique le fonctionnement normal du convertisseur, dans le cas où le fil de signal est cassé ou si le convertisseur ne parvient pas à suivre normalement, ce bit passe du niveau haut au niveau bas.
RIPCLK : sortie de signal zéro RC : lorsque les données de sortie augmentent de tout « 1 » à tout « 0 », ou que les données de sortie diminuent de tout « 0 » à tout « 1 », la sortie est une impulsion positive, la largeur d'impulsion est de 200 μs. .
VL, VS, VS Extrémité entrante de l'alimentation
GND Extrémité entrante du fil de terre
Conseils :
① La tension des broches ne doit pas dépasser 20 % de la valeur nominale.
② La tension d'alimentation ne doit pas dépasser la plage spécifiée.
③ Ne connectez pas les références RHi et RLo à d'autres broches.
④ Pour l'alimentation connectée aux broches +VS et -VS, sa tension doit être de ±15 V et ne doit pas être connectée en sens inverse. L'alimentation logique numérique VL est connectée au +5V. Entre l'alimentation et la terre, un condensateur céramique de 0,1 µF et un condensateur électrolytique de 6,8 µF doivent être connectés en parallèle.
⑤ Les signaux de référence sont connectés à RHi et RLo. Dans le cas de la synchronisation, les signaux sont connectés à S1, S2 et S3 selon les conventions suivantes :
sin(ωt+α) sinθ
sin(ωt+α) sin(θ+120o)
sin(ωt+α) sin(θ +240o)
⑥ Dans le cas du résolveur, les signaux sont connectés à S1, S2, S3 et S4 selon les conventions suivantes :
sin(ωt+α)sinθ
sin(ωt+α) cosθ
Les broches de CB, et doivent toutes être connectées comme décrit pour le transfert de données ci-dessus.
9. Tableau des valeurs de poids (Tableau 4)
Tableau 4 Tableau des valeurs de poids
Bit Angle/bit Angulaire minute/bit Bit Angle Angulaire minute/bit Bit Angle Angulaire minute/bit
1(MSB) 180,0000 10800 7 2,8125 168,75 13 0,0439 2,64
2 90,0000 5400 8 1,4063 84,38 14 0,0220 1,32
3 45,0000 2700 9 0,7031 42,19 15 0,0110 0,66
4 22,5000 1350 10 0,3516 21,09 16(LSB) 0,0055 0,33
5 11,2500 675 11 0,1758 10,55 6 5,6250 387,5 12 0,08 79 5.27 10. Schéma de connexion pour une application typique (Fig. 7) 11. Spécifications de l'emballage (unité : mm) (Fig. . 8, Tableau 5)
Fig. 7 Schéma de connexion pour une application typique Fig. 8 Vue extérieure et dimensions de l'emballage
Tableau 5 Matériaux du boîtier
Modèle de boîtier Embase Placage de l'embase Couvercle Placage du couvercle
Matériau de la broche Placage de la broche Style d'étanchéité Remarques
UP4820- 36A Revêtement Ni 4J42 Revêtement Ni chimique 4J42 Revêtement Au 4J42 Emballage assorti Base plus trois billes de verre solides
12. Clé de numérotation des pièces (Fig. 9)
Fig . 9 Clé de numérotation des pièces Remarque
: lorsque le signal ci-dessus La tension et la tension de référence (Z) ne sont pas standard, elles doivent être données comme suit :
(par exemple la tension de référence 5 V et la tension de signal 3 V sont exprimées en 5/3)
Précautions d'utilisation
Alimenter correctement, lors de la mise sous tension, connecter avec précision les pôles positifs et négatifs du pouvoir pour éviter l’épuisement professionnel.
Pendant l'assemblage, le bas du produit doit s'adapter étroitement au circuit imprimé afin d'éviter d'endommager les broches, et une protection antichoc doit être ajoutée, si nécessaire.
Ne pliez pas les broches pour éviter que l'isolant ne se brise, ce qui affecterait la propriété d'étanchéité.
Lorsque l'utilisateur passe une commande pour le produit, les indices de performances électriques détaillés doivent faire référence à la norme d'entreprise concernée.
Synchronisation/résolveur vers convertisseur numérique
(série MSDC/MRDC37)
1. Caractéristiques (voir Fig. 1 pour la vue extérieure et Tableau 1 pour les modèles)
Haute précision
Petit volume
Vitesse de suivi élevée
Suivi ininterrompu pendant le transfert de données
Sortie de verrouillage à trois états
Faible consommation d'énergie Taille : 50,8 × 50,8 × 10 mm2
Poids : 48 g
Fig.1 Vue extérieure de la série MSDC/MDRC37 2. Champ d'application
Mécanisme servo ; surveillance des antennes ; système de navigation; contrôle de l'artillerie; contrôle industriel; système robotisé; système de contrôle radar.
3. Les
séries MSDC/MRDC37 sont des convertisseurs numériques 16 bits vers synchro/résolveur. Le signal d'entrée est divisé en résolveur à quatre fils et signal d'excitation ou en signal de synchronisation et d'excitation à trois fils. Le signal de sortie est un code binaire naturel parallèle tamponné via un verrou à trois états et compatible avec le niveau TTL.
Le produit applique un circuit servo de second ordre avec un petit volume et un poids léger, et l'utilisateur peut l'utiliser très facilement en contrôlant les broches de signal.
4. Performances techniques (Tableau 1, Tableau 2)
Tableau 1 Conditions nominales et conditions de fonctionnement recommandées
Max. valeur nominale absolue Tension d'alimentation +VS : 12,5~17,5 V
Tension d'alimentation Vs : 17,25~12,5 V
Tension d'alimentation logique VL : 7 V
Plage de température de stockage : -40~+100 ℃
Conditions de fonctionnement recommandées Tension d'alimentation +VS : 15 V ± 5 %
Tension d'alimentation Vs : 15 V ± 5 %
Tension logique VL : 5 V ± 5 %
Tension de référence (valeur efficace) VRef : valeur nominale ± 10 %
Tension de signal (valeur efficace) Vi : ± 10 % de la valeur nominale
Fréquence de référence f* : valeur nominale ±10 %
Plage de température de fonctionnement TA : 40℃~85℃
Remarque : * indique qu'il peut être personnalisé selon les besoins de l'utilisateur.
Tableau 2 Caractéristiques électriques
Caractéristiques Condition
(40~+85℃)
(Sauf indication contraire) (série MSDC/MDRC37) Unité
Min. Max. Résolution/RES 0~360º 12 16 bits
Taux de suivi/St① 3 36 r/sec
Niveau de sortie élevé/VOH TA=25℃ 2,4 V
Niveau de sortie faible/VOL TA=25℃ 0,8 V
Consommation électrique/ PD TA=25℃ 1,3 W
Vel linéarité/ERI TA=25℃ 1,0 %
Plage de tension de référence 2 115 V
Plage de tension du signal 2 90 V
Plage de fréquence 30 2600 Hz
Précision ±3 ±8,5 Minute angulaire
Remarque : ① le la vitesse de suivi est de 3 rps pour une résolution de 16 bits et de 36 rps pour une résolution de 12 bits ; St peut être conçu selon les exigences de l'utilisateur.
5. Principe de fonctionnement (Fig. 2)
Le signal d'entrée de synchronisation (ou le signal d'entrée du résolveur) est converti en signal orthogonal via une isolation différentielle interne :
V1 = KE0sinθ sinωt, V2 = KE0cosθ sinωt
Fig.2 Schéma fonctionnel du principe de fonctionnement
Où θ est l'angle d'entrée analogique.
Ces deux signaux et l'angle numérique φ du compteur interne réversible sont multipliés dans le multiplicateur des fonctions sinus et cosinus et sont traités en erreur :
K·E0sinθ cosφ sinωt-KE0cosθ sinφ sinωt=KE0sin(θ-φ) sinωt
Les signaux sont envoyés à l'oscillateur contrôlé en tension après amplification, discrimination de phase, intégration et filtration. Si θ-φ≠0, l'oscillateur contrôlé en tension modifie les données dans le compteur réversible avec les impulsions de sortie jusqu'à ce que θ-φ devienne zéro avec la précision de le convertisseur, pendant ce processus, le convertisseur suit le changement de l'angle d'entrée θ tout le temps.
La fonction de transfert du convertisseur est illustrée à la Fig. 3.
Fig. 3 Transfert de fonction du convertisseur
Méthode
de transfert de données et séquence temporelle
Il existe deux méthodes pour lire les données effectives dans le convertisseur : la lecture synchrone et la lecture asynchrone.
(1) Mode inhibition (lecture synchrone) :
R : le convertisseur est connecté avec un bus 16 bits. B


 X
X




















 Gold Supplier
Gold Supplier